A Robotic Sanding Cell in ‘Putty Land’
Having technicians manual sand tooling on their hands and knees all day is hard on their bodies and is inconsistent because humans are not able to apply the same force on a workpiece throughout the day, said Hunter McKenzie, manufacturing engineer at Janicki Industries Inc., as he discussed the company's sanding process.
Having technicians manual sand tooling on their hands and knees all day is hard on their bodies and is inconsistent because humans are not able to apply the same force on a workpiece throughout the day, said Hunter McKenzie, manufacturing engineer at Janicki Industries Inc., as he discussed the company’s sanding process. In addition to manufacturing aerospace, industrial and prototype parts, the company produces tooling made of putty and Invar, as well as steel, aluminum, composites, block foam and wood.
Janicki has facilities in Sedro-Woolley and Hamilton, Washington, and employs more than 1,700 people, with continued growth expected.
McKenzie added that the workpieces arrive from the mills with a scalloped surface. “We can have the parts come out of the mill perfectly smooth, but that adds a lot of mill time. Both Invar and putty parts alike would come into the finish bay and then we would hand sand them to remove the scallops.”
Seeking a solution, Janicki turned to GrayMatter Robotics in Carson, California, which offers the Scan&Sand robotic sanding system that incorporates artificial intelligence. The system provides consistent sanding performance for dimensional correction and surface finishing applications, resulting in defect-free surface finishes, according to GrayMatter.
END USER
Janicki Industries Inc.
888-856-5143
www.janicki.com
SOLUTION PROVIDER
GrayMatter Robotics
310-283-2335
www.graymatter-robotics.com
CHALLENGE
Eliminate physically demanding and inconsistent manual sanding of putty and Invar tooling.
SOLUTION
An artificial intelligence-power robotic sanding solution.
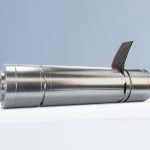
 The Scan&Sand system incorporates a Fanuc M-710iC 6-axis robot. Image courtesy of GrayMatter Robotics“>
The Scan&Sand system incorporates a Fanuc M-710iC 6-axis robot. Image courtesy of GrayMatter Robotics“>
The workpieces measure from 1.83 m long by 1.22 m wide (6′ by 4′) up to 21.34 m long by 4.88 m wide (70′ by 16′), which is the maximum pass of the mill, he noted.
The system’s M-710iC 6-axis Fanuc robot uses a laser scanner and an RGB camera to scan the surface of a part, McKenzie explained. “The laser scanner is used to determine the physical shape of the part, where the RGB camera is used for tape detection. Sometimes we are able to use the tape to avoid areas and also encapsulate the area you want to sand versus not sand.”
Review the print ads from this magazine to continue
This quick advertiser review unlocks the rest of the article and keeps the full-screen reader focused on the ads instead of the page chrome.



MFGAxis Discussion